velmod는 new operator가 load 되어야하는지 마는지에 대한 정보를 담는 2d array
operator는 convolution의 계수(weight)를 의미함
velmod가 이전에 사용된 operator(c)와 다를 경우 새로운 operator가 load되어야 함
readtable2D는 c와 om에 의존적으로 정확한 operator를 load하는 함수임
1. Simple method
알듯이, for문을 이용해 도는 방법
Operator에 대해서 대칭을 사용하지 않고 모든 x와 y의 위치를 반복해서 전체 operator의 길이(oplx * oply 만큼) convolution을 수행하는 방법
아래 코드는 경계부분 처리를 위한 방법을 포함하고 있음
Simple method는 symmetry 특성을 전혀 사용하지 않음
hoplx=(oplx+1)/2;hoply=(oply+1)/2;for(iy=0;iy<ny;iy++){starty=MAX(iy-hoply+1,0);endy=MIN(iy+hoply,ny);for(ix=0;ix<nx;ix++){startx=MAX(ix-hoplx+1,0);endx=MIN(ix+hoplx,nx);/*if velocity changes, then calculate new operator*/if(velmod[iy*nx+ix]!=c){c=velmod[iy*nx+ix];readtable2D(opx,om/c,hoplx,hoply,mode);}/* convolution with the operator */dumr=dumi=0.0;k=MAX(hoply-1-iy,0);for(i=starty;i<endy;i++){l=MAX(hoplx-1-ix,0);for(j=startx;j<endx;j++){dumr+=data[i*nx+j].r*opx[k*oplx+l].r;dumr+=data[i*nx+j].i*opx[k*oplx+l].i;dumi+=data[i*nx+j].i*opx[k*oplx+l].r;dumi-=data[i*nx+j].r*opx[k*oplx+l].i;l++;}k++;}convr[iy*nx+ix].r=dumr;convr[iy*nx+ix].i=dumi;}}
2. Symmetric 2D
3. Symmetric circle
4. Symmetric and cache
위의 방법들은 operator의 symmetry 특성만을 이용한 방법이며, cache에 대해선 고려하지 않았음
이 방법은 cache에 존재하는 data들을 가능한 최대한 다시 재사용하면서 x와 y방향의 대칭을 이용함
또한 inner loop (길이: opersize = oplx * oply)에서 한 번의 엑세스만 필요한 방식으로 데이터를 배열함
이 형태의 데이터를 얻기 위해 x방향으로 tmp3에 addition이 수행됨
tmp4 array는 y 인덱스가 반대인 tmp3과 동일함
tmp3 array는 전체에 대해 재사용됨
x와 y방향의 대칭 특성이 이용되었음
x 방향의 대칭(symmetry)특성을 이용한 addition은 tmp3 array에 저장됨
The symmetry in the y direction is used by making a reversed copy of tmp3 such that stride one access can be used.
Original paper: https://arxiv.org/pdf/1905.02244.pdf
Authors: Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Chen, Mingxing Tan, Weijun Wang, Yukun Zhu, Ruoming Pang, Vijay Vasudevan, Quoc V. Le, Hartwig Adam (Google)
Abstract
새로운 아키텍쳐를 적용시키는 등의 여러 상호 보완적인 기술들을 조합해서 MobileNet v3를 제안
MobileNet v3는 mobile phone CPU에 최적화되어있음
NetAdapt와 NAS를 조합해서 새로운 구조를 제안
본 논문에서는 automated search 알고리즘과 네트워크 디자인이 어떻게 같이 동작해서 전체적인 SOTA 성능을 달성하는지에 대한 보완적인 방법들을 다룸
그 과정에서 MobileNetV3-Large와 MobileNetV3-Small이라는 모델을 제안함
Large는 high resource 사용시, Small은 low resource 사용시
위 두 모델들은 Object detection과 Semantic segmentation에 적용되어 테스트 됨
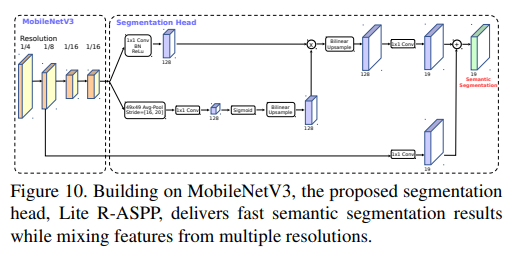
Semantic segmentation(or any dense pixel prediction)에서는 효율적인 새로운 segmentation decoder인 Lite Reduced Atrous Spatial Pyramid Pooling (LR-ASPP)를 제안함
Mobile환경에서의 classification, detection, segmentation task에서 SOTA 성능을 달성했음
MobileNetV3-Large는 MobileNetV2에 비해 ImageNet classification에서 3.2% 정확하면서도 20%의 latency가 개선됨
MobileNetV3-Small은 MobileNetV2에 비해 비슷한 latency로 6.6% 더 정확했음
MobileNetV3-Large는 MobileNetV2에 비해 MS COCO detection에서 25% 빠르면서도 비슷한 정확도를 보였음
MobileNetV3-Large LR-ASPP는 MobileNetV2 R-ASPP에 비해 Cityspace segmentation에서 34% 빠르면서도 비슷한 정확도를 보였음
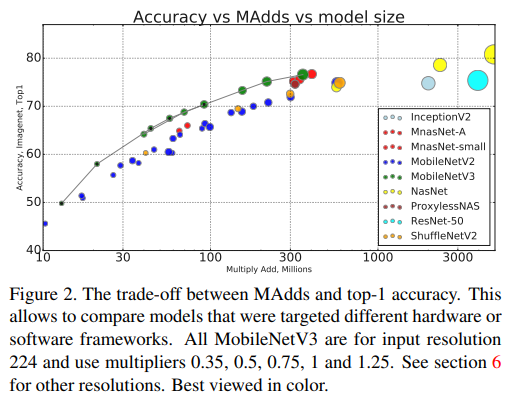
위의 figure 2는 MAdds에 따른 top-1 accuracy trade-off를 보여줌
각 모델의 input은 224 resolution을 이용함
각 점들은 0.35, 0.5, 0.75, 1, 1.25의 multiplier를 의미함
제안하는 방법이 전반적으로 연산량도 적으면서 정확도가 높은 것을 확인 할 수 있음
1. Introduction
효율적인 on-device 인공신경망은 mobile 적용 시대에 있어서 매우 흔함
이러한 on-device 딥러닝은 사용자의 개인정보를 서버로 전송하지 않고도 사용자에 최적화된 구동을 위해 필수로 필요한 분야
On-device를 가능하게 하는 효율적인 구조들은 높은 정확도와 적은 latency와 함께 효율적인 구동으로 인해 mobile device의 battery life를 늘려줌
본 논문에선 on-device computer vision을 강화하기 위해 더 정확하고 효율적인 MobiletNetV3 Large와 Small 모델들을 제안함
논문에서 제안하는 네트워크는 SOTA 성능을 뛰어넘었으며 automated search와 새로운 아키텍처에 결합해 효과적으로 새로운 모델을 구축하는 방법을 설명
논문의 목표는 accuracy-latency 최적화를 통해 mobile환경에서 최고의 mobile computer vision architecture를 제안하는 것
이를 위해 다음의 것들을 설명
Complementary search techniques
Mobile setting에 효율적인 새로운 non-linearities practical version을 제안
새로운 효율적인 네트워크 디자인
새로운 효율적인 segmentation decoder
위의 것들을 mobile phone에서 다양하고 광범위한 방법으로 효율성등을 실험적으로 검증함
아래의 흐름을 따름
Section 2에선 related work에 대해서 다룸
Section 3에선 mobile model들의 efficient building block들에서 사용된 방법들을 리뷰
Section 4에선 NAS와 MnasNet, NetAdapt 알고리즘들의 상호적인 보완적 특성을 다룸
Section 5에선 joint search를 통해 찾아진 모델의 효율을 높히는 새로운 architecture design을 설명
Section 6에선 classification, detection, segmentation task를 이용해 모델의 효율과 각 적용요소들의 contribution에 대해 실험하고 결과를 설명
Section 7에선 결론 및 future work를 다룸
2. Related Work
최근 다방면에서 뉴럴넷의 최적의 정확도-효율 trade-off를 찾기위한 다양한 연구들이 수행됨
Hand-crafted 구조들과 NAS를 이용해 찾아진 구조들 모두 이 분야의 연구를 위해 주요하게 사용됨
SqueezeNet[22]은 squeeze와 expand 모듈과 1x1 컨벌루션을 광범위하게 사용해 파라미터 수를 줄이는것에 중점을 두고 연구되었음
최근에는 파라미터 수를 줄이는 것 뿐만 아니라 실질적인 latency를 줄이기 위해 연산량(MAdds)을 줄이기 위한 연구가 수행됨
MobileNetV1[19]은 연산 효율 증가를 위해 depthwise separable convolution을 사용함
MobileNetV2[39]은 위의 방법을 이용하면서도 resource-efficient한 inverted residual block과 linear bottleneck을 제안함
ShuffleNet[49]은 group convolution과 channel shuffle 연산을 활용해 연산량을 줄임
CondenseNet[21]은 모델 학습단에서 group convolution을 학습시켜 feature 재사용을 위한 layer간 dense connection을 활용했음
ShiftNet[46]은 연산비용이 비싼 spatial convolution을 대체하기 위해 point-wise convolution을 중간에 끼워넣은 shift operation을 제안함
강화학습을 이용한 NAS로 찾아진 효율적이면서도 competitive한 정확도를 갖는 architecture design들이 있음[53, 54, 3, 27, 35]
A fully configurable search space can grow exponentially large and intractable.
따라서 초기 NAS 연구들은 cell level structure에 집중되었으며, 이로인해 같은 cell들이 모든 layer들에서 재사용되는 구조를 가졌음
최근 [43]과 같은 연구에선 block-level의 계층적인 search space에 대해 연구하며 다른 layer structure를 다른 resolution block에서 사용 가능하게 했음
네트워크 탐색 과정의 연산비용 감소를 위해서 [28, 5, 45]등에선 gradient based optimization이 적용된 differentiable architecture search framework가 사용되었음
또한, 현존하는 네트워크를 강제로 mobile platform에 최적화 시키기 위해 [48, 15, 12]에서는 더 효율적인 automated network simplification algorithm들을 제안함
[23, 25, 47, 41, 51, 52, 37]에선 양자화(quantization)라는 또다른 complementary effort를 적용시켜 precision arithmetic을 줄여서 네트워크를 효율화시킴
마지막으로 [4, 17]에서는 지식증류(knowledge distillation)를 이용해 추가적인 complementary method를 제안했으며, 크고 정확한 teacher network를 통해 작고 부정확한 student network의 효율이 향상됨
3. Efficient Mobile Building Blocks
Mobile model들은 엄청 효율적인 building block들을 이용해 만들어짐
MobileNetV1[19]은 depth-wise separable convolution을 이용해 일반적인 conv를 대체하는 방법을 제안함
Depthwise separable convolution은 효과적으로 일반 conv를 factorize했으며, 이는 feature 생성에서 spatial filtering을 분리시킨 결과
Depthwise separable conv는 두 개의 분리된 layer로 구성되며, spatial filtering을 위한 light weight depthwise convolution과 feature generation을 위한 heavier 1x1 pointwise conv로 구분됨
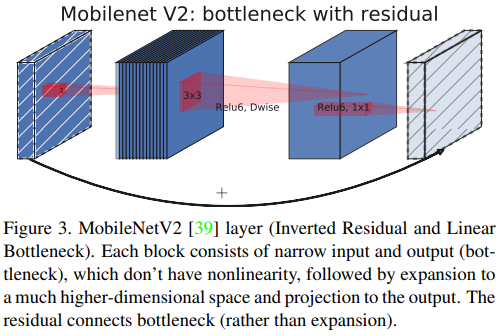
MobileNetV2[39]은 중요도가 떨어지는 정보의 영향력을 고려해 모델의 효율화를 시킬 수 있는 linear bottleneck과 inverted residual structure를 제안함
이 구조는 아래 figure 3에서 확인 가능하며, 이는 depth-wise conv와 1x1 projection layer 뒤에 1x1 expansion convolution으로 구성됨
Input과 output은 채널 수가 같은 경우 residual connection으로 연결되게 되어있음
이 구조는 비선형 채널 별 변환의 expressiveness를 높이기 위해 블록 안에서 더 높은 차원의 feature space로 확장시켰고, 이로인해 블록의 입력 및 출력에서 compact한 표현이 유지됨
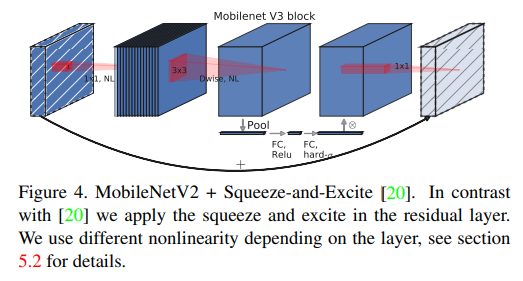
MnasNet[43]은 MobileNetV2 구조를 기반으로 하는 구조이며, bottleneck 구조에 squeeze and excitation에 기반한 모듈을 제안함.
여기서 squeeze and excitation module은 [20]의 ResNet 기반의 모듈에 다른 위치에서 integrated된 모듈임
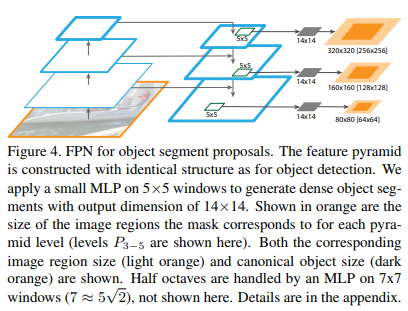
모듈은 figure 4에서 채널 확장 시의 depthwise filter 뒤에 위치하며, 이는 largest representation에 좀 더 attention을 주기 위함임
MobileNetV3에선 이러한 방법들의 조합을 building block으로 사용하며, 이는 더 효율적인 모델을 만들기 위함임
각각 두 squeeze and excitation 또한 swish nonlinearity를 사용했으며, sigmoid는 비효율적인 연산을 대체하면서도 fixed point arthmetic의 정확도 보존을 위해 hard sigmoid[2, 11]을 적용함
자세한 내용은 Section 5.2에서 다뤄짐
4. Network Search
[53, 43, 5, 48]에선 network search가 새로운 architecture를 찾는 매우 강력한 tool이라는 것을 보여줌
MobileNetV3에선 각 network block을 최적화하여 global network structure를 찾았으며, platform-aware NAS를 사용함
다음으로 NetAdapt 알고리즘을 이용해 layer의 최적의 filter 갯수를 찾음
이러한 techniques들은 상호보완적(complementary)이며 주어진 하드웨어 플랫폼 상에서 효율적으로 최적의 조합을 찾기 위해 조합해 사용 가능함
4.1. Platform-Aware NAS for Block-wise Search
[43]과 유사하게 global network structure를 찾기 위해 platform-aware neural architecture approach를 사용함
동일한 RNN-based conwtroller와 같은 factorized hierarchical search space를 사용했기 때문에 [43]과 유사한 결과를 얻었으며, Large mobile model의 target latency는 80ms을 목표로 함
따라서 논문에선 MnasNet-A1[43]을 initial Large mobile model로 재사용했으며, NetAdapt[48]과 다른 optimization 방법들을 적용시켜 최적화함
하지만 처음에 얻어진 design은 small mobile model에 최적화 되어있지 않았음
특히, 이 방법은 multi-objective reward $ACC(m)\times[LAT(m)/TAR]^w$를 Pareto-optimal solution을 근사화하기 위해 사용했음
$m$: 생성된 모델
$ACC(m)$: 모델의 정확도
$LAT(m)$: 모델 latency
$TAR$: Target latency
하지만, 작은 모델들의 latency와 비교해 정확도가 더 극적으로 변하는것을 확인했음
따라서 latency 변화에 따른 더 큰 정확도 변화를 보완하기 위해 작은 weight factor $w=-0.15$(vs the original $w=-0.07$[43])를 사용함
논문의 강화된 새로운 weight factor $w$에 따라 from scratch로 새로운 initial seed model을 NAS를 이용해 찾았으며, 다음으로 NetAdapt와 other opimization 들을 적용시켜 최종적으로 MobileNetV3-Small 을 얻어낼 수 있었음
4.2. NetAdapt for Layer-wise Search
저자들이 사용한 다음 기술은 NetAdapt[48].
이는 platform-aware NAS에 complimentary(무료)
Coarse(조잡한) but global한 architecture를 infer(추론)하지 않고, 순차적으로 개별 레이어를 fine-tuning 할 수 있게 함
자세한 내용은 논문 참조
짧게 technique proceed는 아래와 같음
Platform-aware NAS로 찾아진 seed network architecture로 시작
각 step에서
(a) New proposal set을 생성. 각 proposal은 이전 step과 비교해서 latency이 최소 $\delta$ 만큼 감소되는 architecture의 modification을 의미함
(b) 각 proposal에 이전 step에서 pre-trained model을 사용하며, 새로 제안 된 architecture를 채우고 누락된 weight를 적절히 자르고 random하게 initialize함. 각 proposal을 $T$ step동안 fine-tuning해서 대략적으로 accuracy를 얻음
(c) Some metric을 이용해 최적의 proposal을 선택
이전 step을 target latency가 얻어질때까지 반복
[48]에서는 accuracy change를 최소화하는것을 metric으로 사용함
본 논문에선 이 알고리즘을 latency change와 accuracy change의 비율을 최소화하도록 바꿈
이는 각 NetAdapt step에서 생성 된 모든 proposal에 대해 $\frac{\delta Acc}{|\delta latency|}$를 최대화 하는 proposal을 선택하도록 함
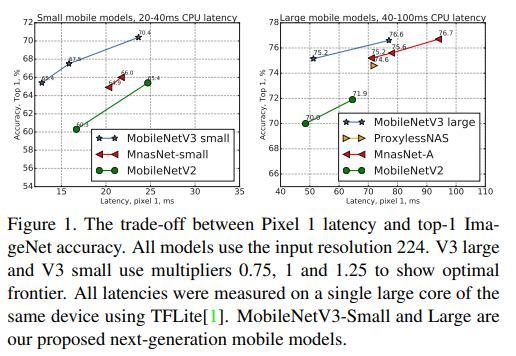
위의 figure 1에서 보여지듯 제안하는 모델이 MnasNet[43], ProxylessNas[5], MobileNetV2[39]과 같은 SOTA 모델들의 성능을 뛰어넘음
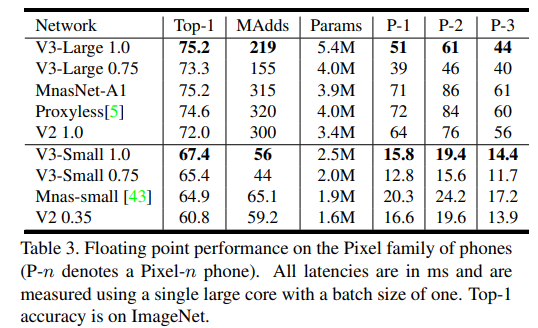
Table 3에선 서로다른 Pixel 폰에서 floating point 연산의 성능을 보여줌
위의 table 3은 구글 pixel phone의 1, 2, 3세대에 따른 성능을 보여줌
모든 latency는 ms단위이며, single large core with batch size 1의 성능을 보임
Top-1 ImageNet accuracy를 볼 수 있음
제안하는 모델이 가장 빠르면서도 정확하게 동작하는것을 확인 할 수 있음
표에서 모델 옆의 숫자는 MobileNets와 동일하게 width multiplier hyperparameter를 의미하는듯.
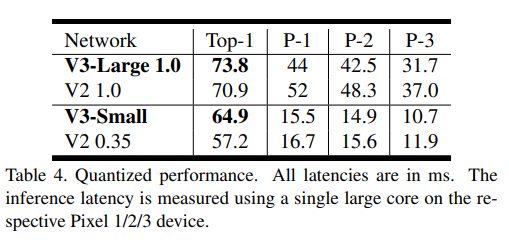
Table 4에선 quantization을 포함시킨 결과를 보여줌
위의 table 4에서 모든 latency 단위는 ms를 의미함.
위 table 3과 동일하게 각각 구글 픽셀 1, 2, 3에서 single large core 결과를 보여줌.
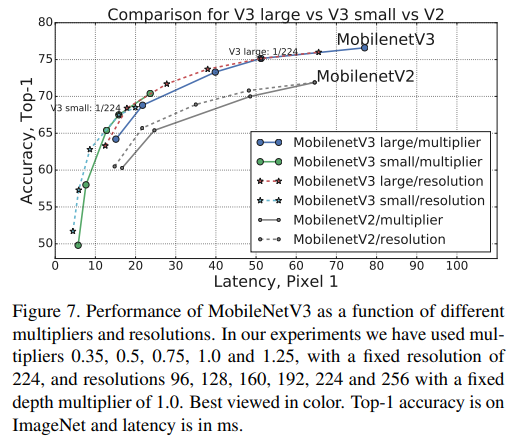
위의 figure 7에서, MobileNetV3의 multiplier와 resolution에 따른 성능 trade-off를 볼 수 있음
여기서 눈여겨 볼 점은 MobileNetV3-Small이 성능을 맞추기 위해 multiplier가 적용된 MobileNetV3-Large의 성능을 3%가량 앞섰다는 점임
반면 resolution은 multiplier보다 더 나은 trade-off를 보여줌
하지만, resolution은 대게 task에 의해 결정되므로(예를 들어 segmentation과 detection 문제에선 일반적으로 higher resolution을 필요함) 항상 튜닝 가능한(tunable) 파라미터로 볼 수 없음
6.2.1 Ablation study
Impact of non-linearities
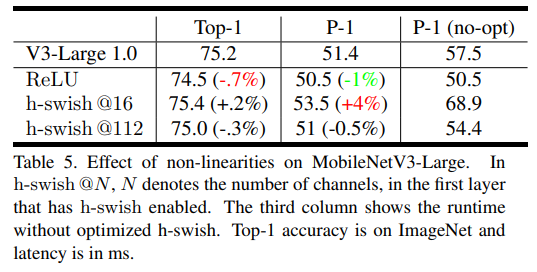
Table 5에서는 h-swish의 삽입 위치와 naive(vanilla) implementation에 대한 optimized implementation 결과를 보여줌
Table 5는 MobileNetV3-Large의 nonlinearity에 대한 영향을 보여줌
h-wish@N에서 N은 h-swish가 적용된 첫 번째 레이어의 채널의 수를 의미함
세 번째 column은 optimized h-swish가 없을 때의 runtime을 보여줌
ImageNet Top-1 accuracy와 이 때의 latency를 ms단위로 나타냄
실험 결과를 볼 때, 최적화 적용된 h-swish가 6ms정도(연산시간의 10%이상)를 줄여주는것을 확인 할 수 있음
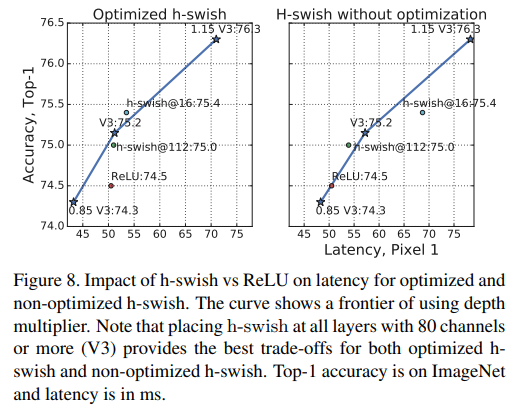
Figure 8에선 nonlinearity choice와 network width에 의한 효율적인 frontier를 보여줌
Figure 8은 최적화 및 최적화 되지 않은 h-swish와 h-swish vs ReLU의 latency를 보여줌
Curve는 depth multiplier에 따른 frontier를 보여줌
80개 이상의 채널을 갖는 V3의 모든 레이어에 최적화된 h-swish나 그냥 h-swish를 적용하면 모두 best trade-off를 provide함
표는 Top-1 ImageNet accuracy와 latency를 ms단위로 보여줌
MobileNetV3은 네트워크 중간부터 h-swish를 사용하며, ReLU의 성능을 확실하게 뛰어넘음
단순히 전체 네트워크에 h-swish를 추가하는것만으로도 네트워크를 넓게 하는것보다 성능이 약간 더 좋다는것이 흥미로운 점임
Impact of other components
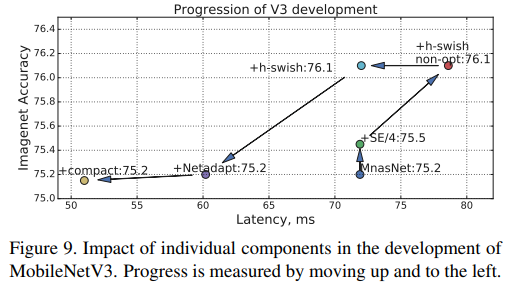
Figure 9에선 다른 component들의 적용이 latency와 accuracy의 곡선을 따라 어떻게 변화했는지를 보여줌
Figure 9의 그래프는 처음에서 위-왼쪽으로 움직임
6.3. Detection
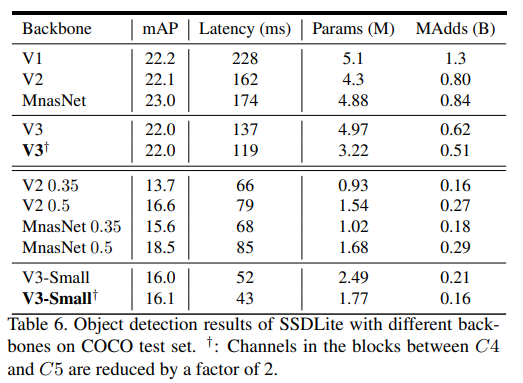
논문의 MobileNetV3을 SSDLitye[39]의 backbone으로 사용했으며, 다른 네트워크들과 MS COCO에서 성능을 비교함
MobileNetV2에 따라서 SSDLite의 feature extractor의 뒷부분에 첫 번째 layer(output stride 16)와 두 번째 layer(output stride 32)을 추가하고 이를 각각 C4와 C5로 정의함
MobileNetV3-Large에 대해 C4는 14번째 bottleneck block의 expansion layer로 작용함
MobileNetV3-Small에 대해 C4는 9번째 bottleneck block의 expansion layer로 작용함
두 네트워크에 C5 layer는 pooling 바로 앞에 붙음
또한 C4와 C5 사이의 모든 feature layer의 채널 수를 2씩 줄임
이는 MobileNetV3의 뒷쪽의 몇 레이어들이 1000개 class를 추론하도록 tune되어있기 때문이며, 이는 COCO의 90개 class 추론을 위한 task에 redundancy로 작용하기 때문임
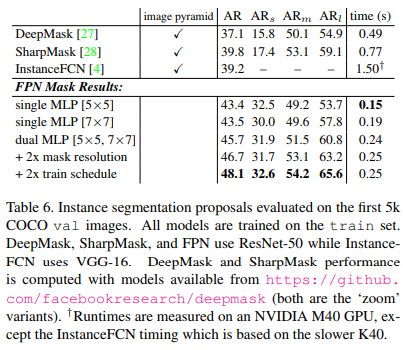
Table 6는 MS COCO 실험결과를 보여줌
Channel reduction이 적용되었을 때 MobileNetV3-Large는 MobileNetV2보다 27% 빠르면서도 동일한 mAP 점수를 가졌음
MobileNetV3-Small with channel reduction 모델은 MobileNetV2와 MnasNet보다 각각 2.4와 0.5mAP가 높으면서도 35% 빠르게 동작했음
두 MobileNetV3 모델 모두 channel reduction trick을 적용시켜 15%의 redundancy를 줄이면서도 mAP의 loss는 없었음
ImageNet classification과 COCO object detection 모두 다른 feature extractor 모양을 가지면서도
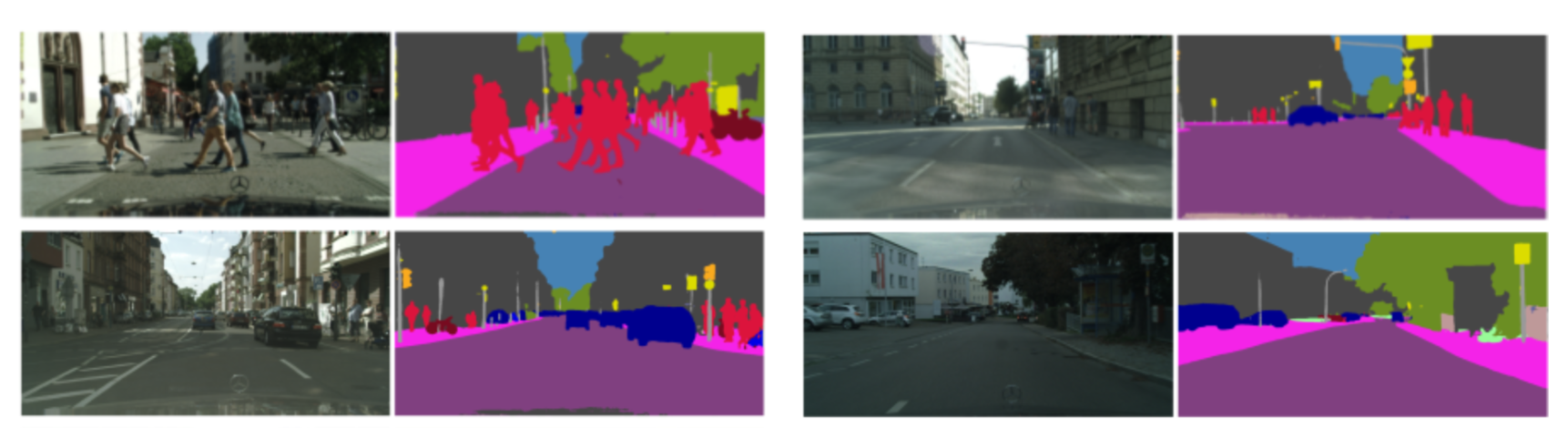
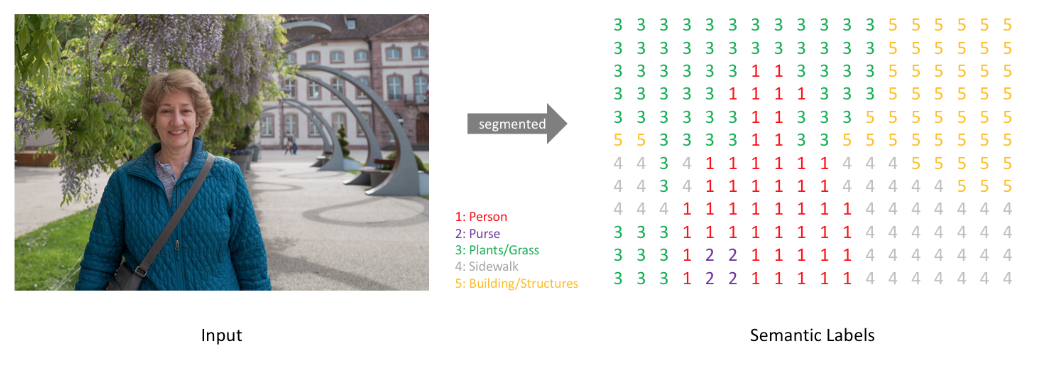
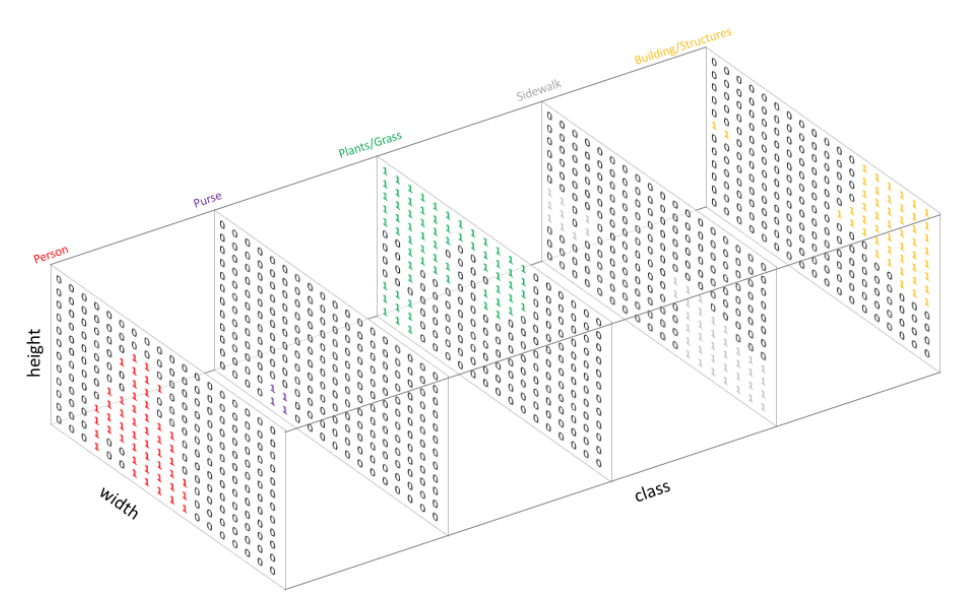
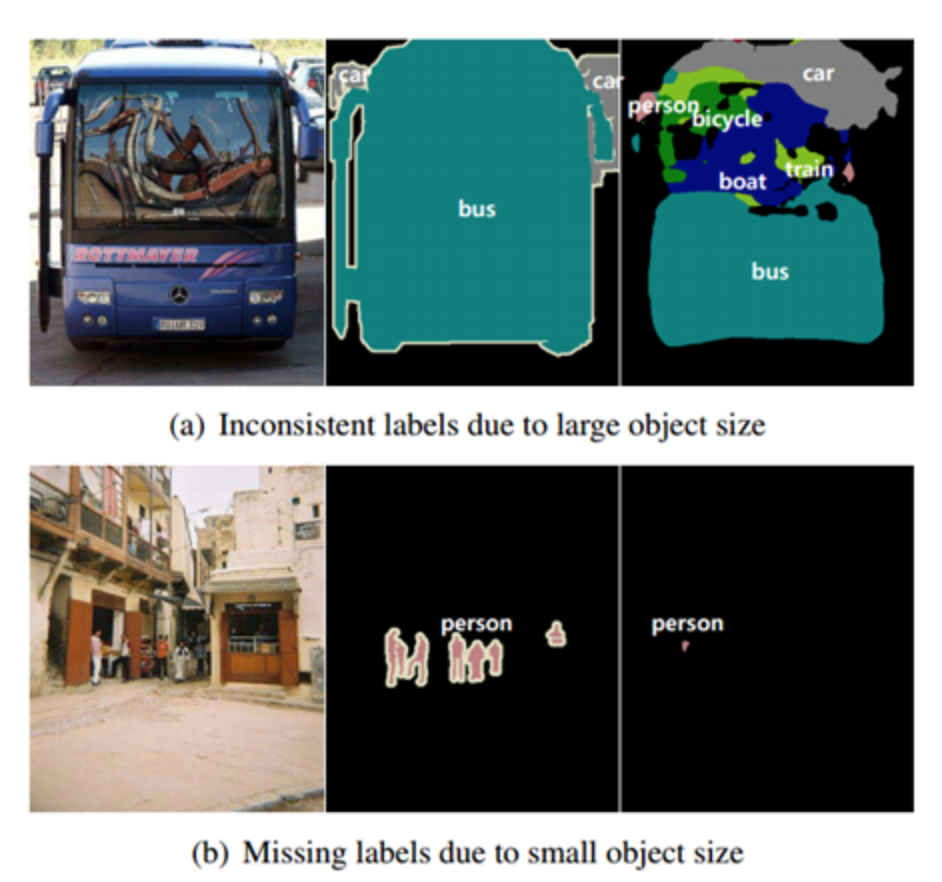
6.4. Semantic Segmentation
In this subsection, we employ MobileNetV2 [39] and the proposed MobileNetV3 as network backbones for the task of mobile semantic segmentation.
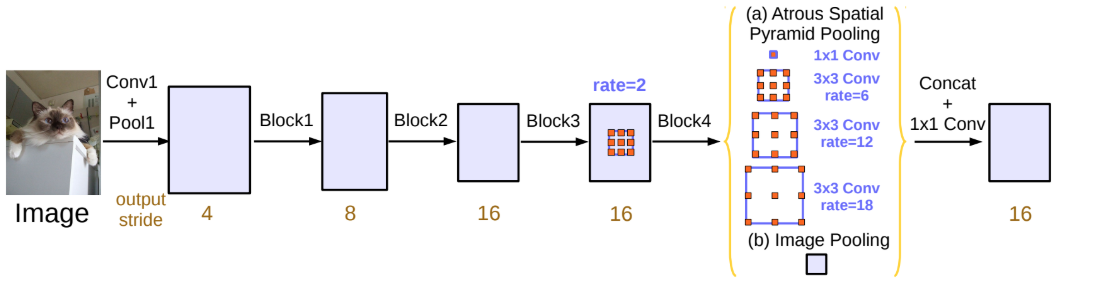
Additionally, we compare two segmentation heads. The first one, referred to as R-ASPP, was proposed in [39]. R-ASPP is a reduced design of the Atrous Spatial Pyramid Pooling module [7, 8, 9], which adopts only two branches consisting of a 1 × 1 convolution and a global-average pooling operation [29, 50].
In this work, we propose another light-weight segmentation head, referred to as Lite R-ASPP (or LR-ASPP), as shown in Fig. 10.
Lite R-ASPP, improving over R-ASPP, deploys the global-average pooling in a fashion similar to the Squeeze-and-Excitation module [20], in which we employ a large pooling kernel with a large stride (to save some computation) and only one 1×1 convolution in the module.
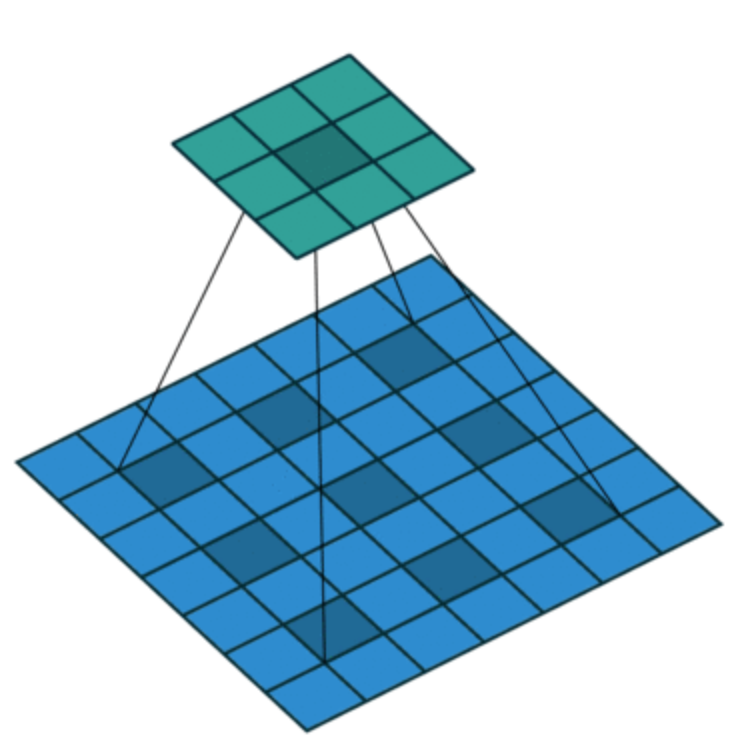
We apply atrous convolution [18, 40, 33, 6] to the last block of MobileNetV3 to extract denser features, and further add a skip connection [30] from low-level features to capture more detailed information.
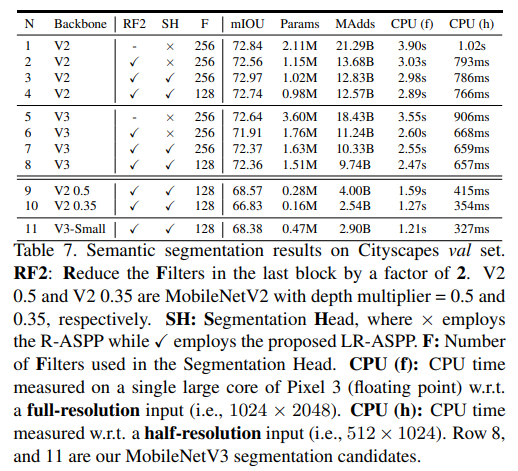
We conduct the experiments on the Cityscapes dataset[10] with metric mIOU [14], and only exploit the ‘fine’ annotations. We employ the same training protocol as [8, 39].
All our models are trained from scratch without pretraining on ImageNet [38], and are evaluated with a single-scale input.
Similar to object detection, we observe that we could reduce the channels in the last block of network backbone by a factor of 2 without degrading the performance significantly.
We think it is because the backbone is designed for 1000 classes ImageNet image classification [38] while there are only 19 classes on Cityscapes, implying there is some channel redundancy in the backbone.
We report our Cityscapes validation set results in Tab. 7.
As shown in the table, we observe that (1) reducing the channels in the last block of network backbone by a factor of 2 significantly improves the speed while maintaining similar performances (row 1 vs. row 2, and row 5 vs. row 6), (2) the proposed segmentation head LR-ASPP is slightly faster than R-ASPP [39] while performance is improved (row 2 vs. row 3, and row 6 vs. row 7), (3) reducing the
filters in the segmentation head from 256 to 128 improves the speed at the cost of slightly worse performance (row 3 vs. row 4, and row 7 vs. row 8), (4) when employing the same setting, MobileNetV3 model variants attain similar performance while being slightly faster than MobileNetV2 counterparts (row 1 vs. row 5, row 2 vs. row 6, row 3 vs. row 7, and row 4 vs. row 8), (5) MobileNetV3-Small attains similar performance as MobileNetV2-0.5 while being faster, and (6) MobileNetV3-Small is significantly better than MobileNetV2-0.35 while yielding similar speed.
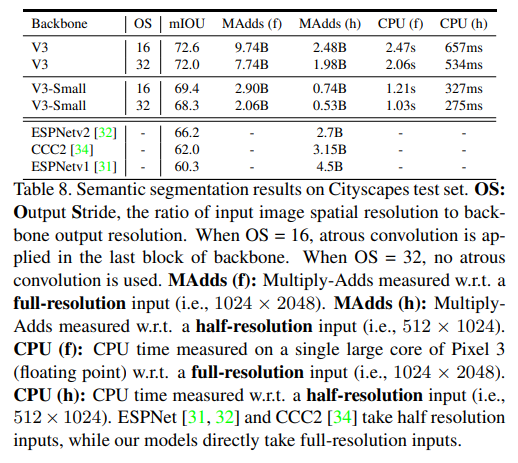
Tab. 8 shows our Cityscapes test set results.
Our segmentation models with MobileNetV3 as network backbone outperforms ESPNetv2 [32], CCC2 [34], and ESPNetv1 [32] by 6.4%, 10.6%, 12.3%, respectively while being faster in terms of MAdds. The performance drops slightly by 0.6% when not employing the atrous convolution to extract dense feature maps in the last block of MobileNetV3, but the speed is improved to 1.98B (for half-resolution inputs), which is 1.36, 1.59, and 2.27 times faster than ESPNetv2, CCC2, and ESPNetv1, respectively. Furthermore, our models with MobileNetV3-Small as network backbone still outperforms all of them by at least a healthy margin of 2.1%.
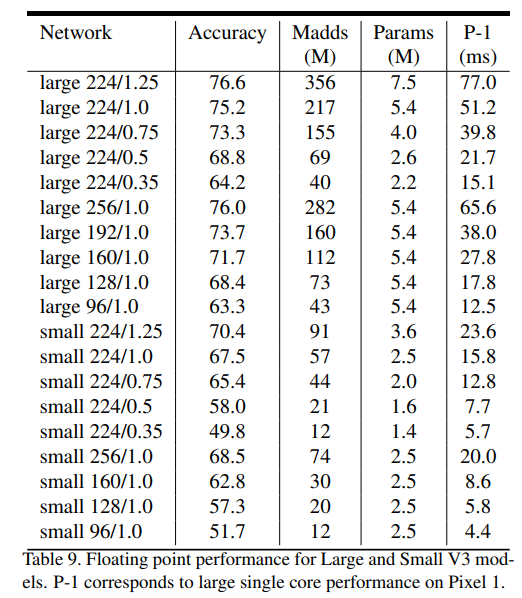
A. Performance table for different resolutions and multipliers
We give detailed table containing multiply-adds, accuracy, parameter count and latency in Table 9.
7. Conclusion and Future Work
본 논문에선 MobileNetV3 Large와 Small 모델을 제안했으며, mobile classification, detection, segmentation에서 SOTA였음
논문에선 차세대 모바일용 모델을 제안하기 위해 네트워크 설계 뿐만 아니라 여러 NAS 알고리즘들을 활용함
Swish와 같은 nonlinearity를 어떻게 최적화하는지 보였으며, quantization friendly(효과적인)한 squeeze and excite를 적용하고 효율성 측면에서 mobile model domain에 적용시킴
또한 lightweight segmentation decoder인 LR-ASPP를 제안함
NAS을 인간의 직관과 가장 잘 혼합하는 방법에 대한 open question이 남아있지만, 저자들은 이러한 question에 대한 첫 번째 긍정적인 결과를 제시함
Summary
NAS를 이용하여 MNasNet와 MobileNetV2 layer 기반의 MobileNetV3를 제안했음
 Seongkyun Han's blog
Seongkyun Han's blog